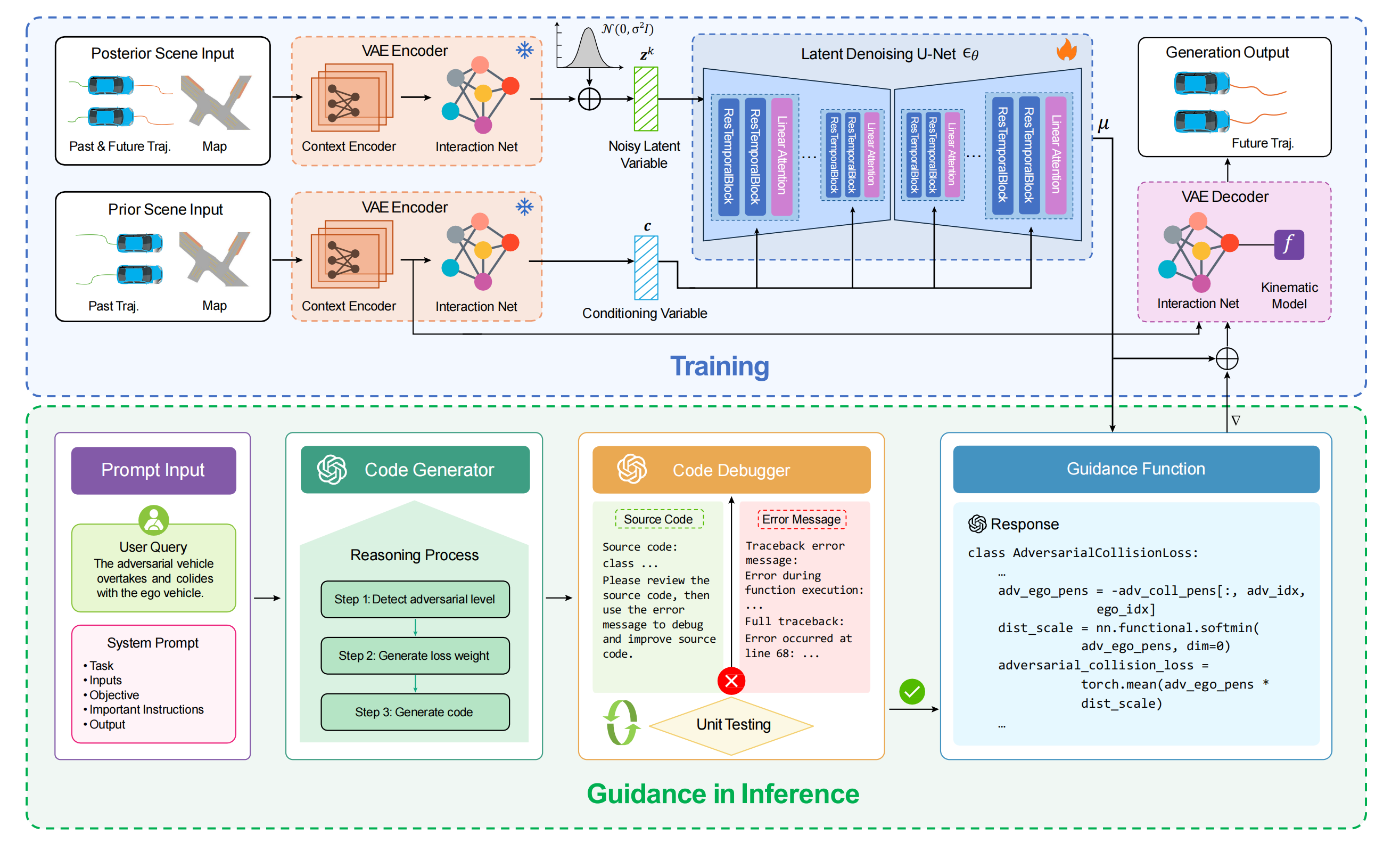
Safety-Critical Traffic Simulation
The ego vehicle faces a critical decision while merging at a ramp.
The ego vehicle encounters a critical situation as a static vehicle suddenly starts moving, requiring the ego vehicle to brake in time.
The ego vehicle encounters a safety-critical interaction with another vehicle at an intersection.
The ego vehicle encounters a safety-critical simulation as the leading vehicle suddenly brakes, requiring the ego vehicle to avoid a rear-end collision.
The ego vehicle encounters a safety-critical scenario involving a sudden cut-in by an adjacent vehicle.
The ego vehicle encounters a challenging scenario with an oncoming vehicle driving against traffic, requiring a prompt response.
Overall performance comparison of baseline models on the nuScenes dataset
| Method | Adversariality | Behavior Plausibility | Efficiency | |||||
|---|---|---|---|---|---|---|---|---|
| Adv-Ego Coll. | Adv Acc. | Adv Offroad | Other Offroad | Adv-Other Coll. | Other-Ego Coll. | Other-Other Coll. | Sim Time | |
| AdvSim | 24.72 | 0.90 | 15.60 | 14.85 | 0.56 | 0.91 | 0.11 | 338.35 |
| Strive | 22.69 | 0.88 | 18.94 | 16.64 | 0.90 | 1.08 | 0.05 | 609.72 |
| DiffScene | 15.06 | 0.98 | 19.71 | 19.65 | 8.03 | 2.60 | 1.67 | 199.01 |
| Safe-Sim | 27.81 | 1.09 | 21.79 | 18.12 | 7.52 | 3.21 | 0.66 | 193.59 |
| LD-Scene | 40.75 | 1.36 | 12.52 | 17.95 | 4.93 | 2.17 | 0.66 | 229.40 |
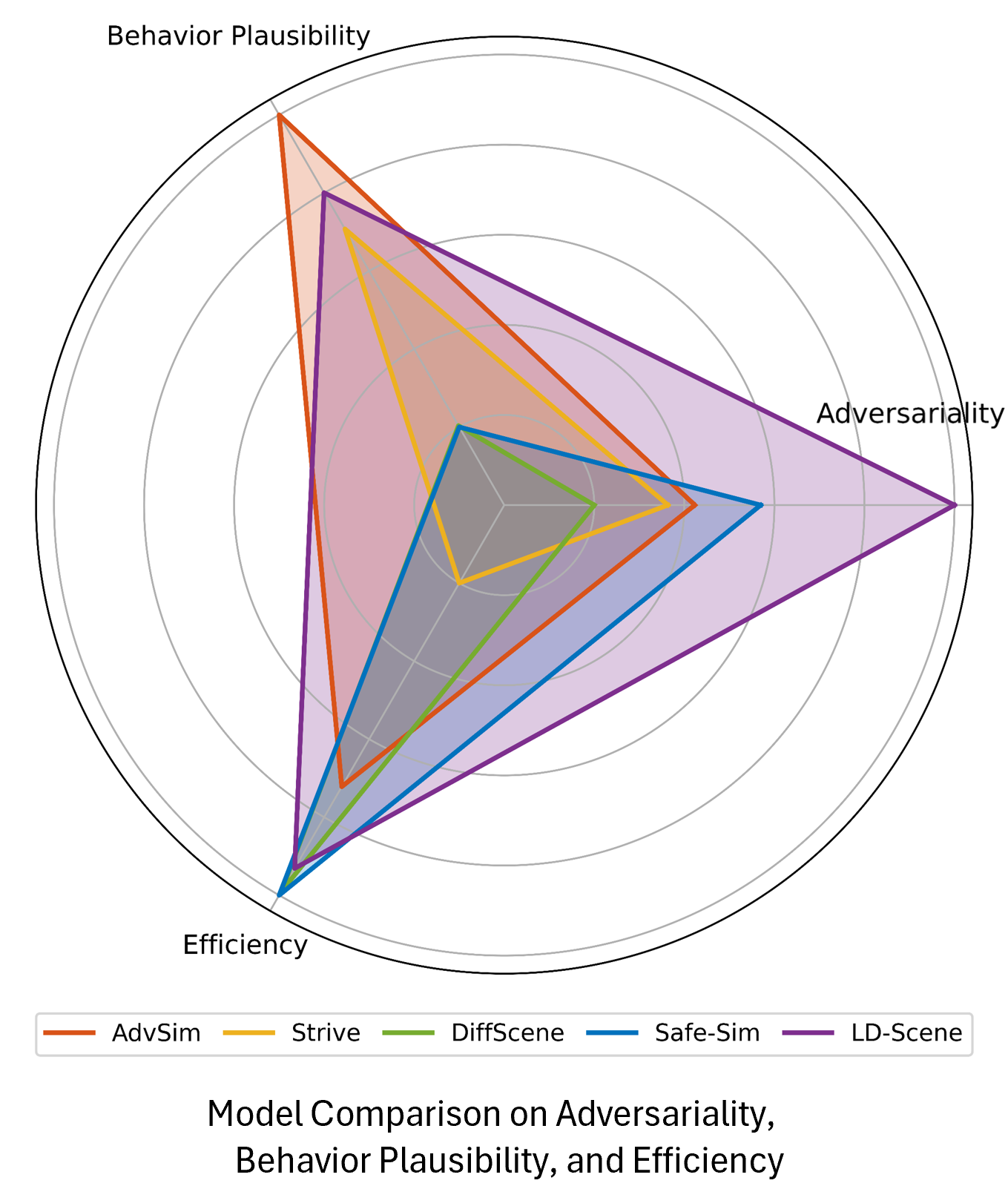
This balanced performance confirms that LD-Scene achieves the strongest adversarial effectiveness while maintaining high levels of realism and generation efficiency, thus demonstrating its superiority across all evaluation metrics.